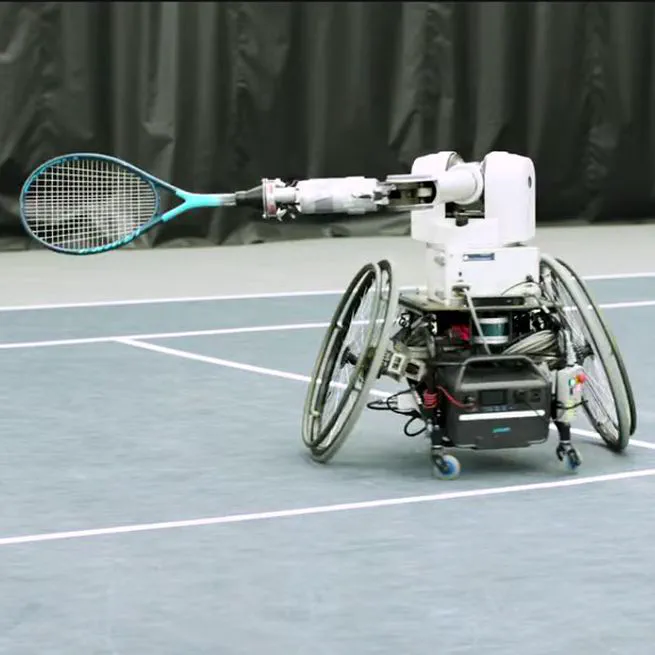
Experimental Sport Tennis Wheelchair Robot (ESTHER)
Perform the learning-based robot perception and decision-making with our self-built ESTHER robot.
Mar 1, 2024
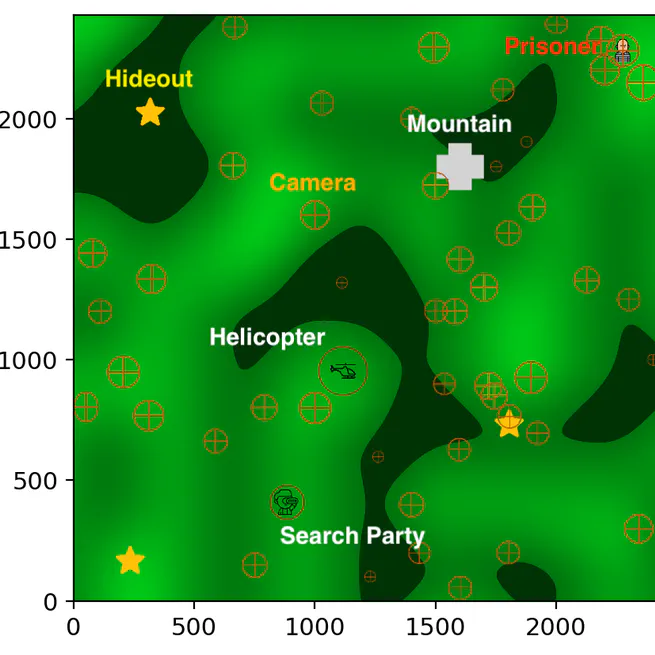
Motion planning and Communication in Pursuit-Evasion Games
In this project, we develop some partially observable adversarial domains and implement novel Reinforcement and Imitation learning based pursuit-evasion algorithms for motion planning and communication attacking.
Mar 30, 2023