Here is a selection of projects that I have worked on over the years.
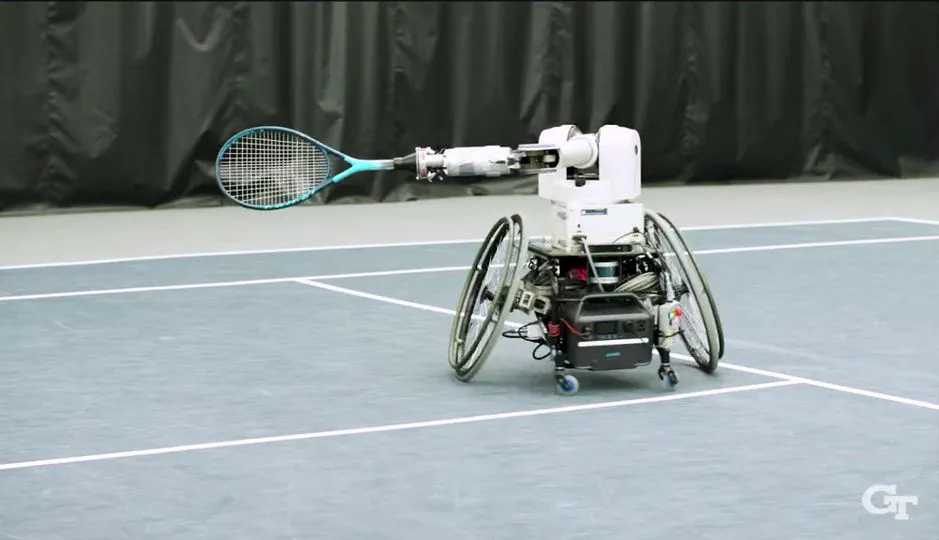
Perform the learning-based robot perception and decision-making with our self-built ESTHER robot.
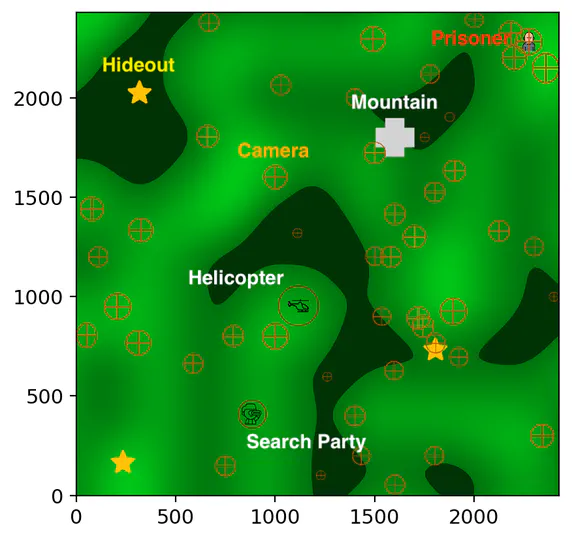
In this project, we develop some partially observable adversarial domains and implement novel Reinforcement and Imitation learning based pursuit-evasion algorithms for motion planning and communication attacking.
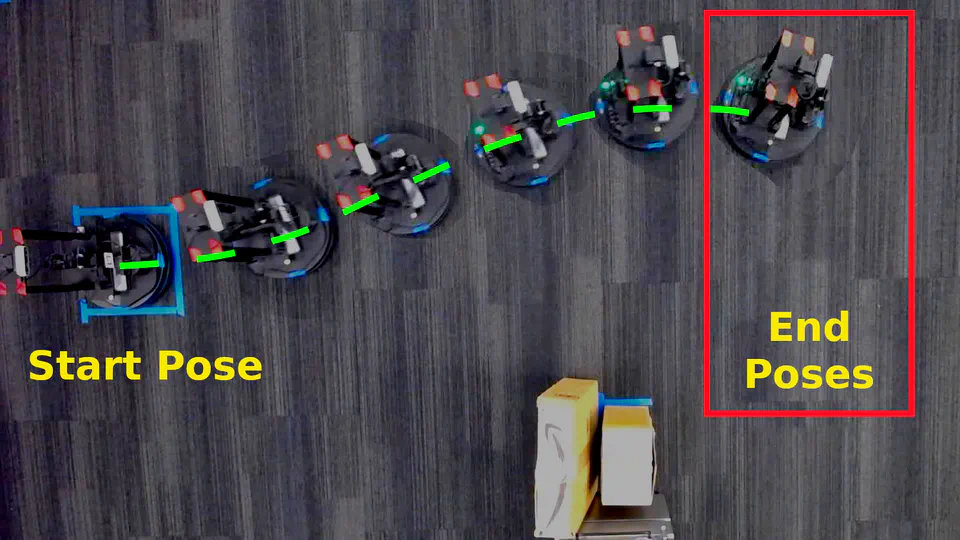
In this work, we discover how to combine the Image-based Visual Servoing and SLAM techinques to track the short and long trajectories in Cartesian spaces.
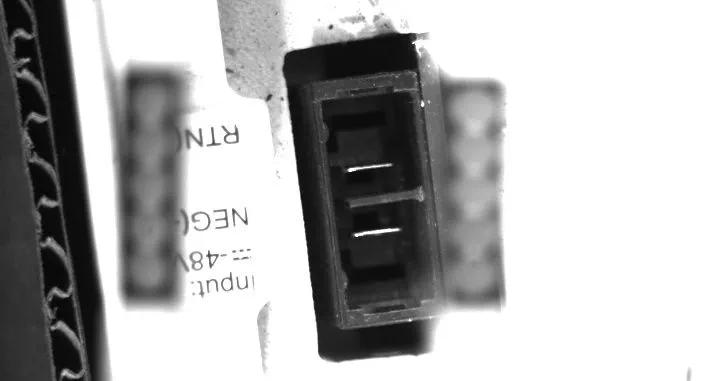
We attach the socket and a camera on a manipulator to perform the eye-in-hand Image-based Visual Servo to plug it into the outlet. This is the first time I operate the real robot.